







CUAV V6X Flight Controller
₹30,476
H7 Double-precision floating-point processor
High-performance ARM M3 coprocessor
Low-noise Car-grade IMUs
Triple redundant IMUs and dual redundant barometer designs
Car-grade RM3100 magnetic compass
New built-in shock absorption design
Out of stock
Description
CUAV V6X Flight Controller is a new generation of Pixhawk designed by CUAV and PX4; it is designed based on the Pixhawk FMU V6X standard and pursues ultimate security and stability; it adopts H7 double-precision floating-point arithmetic unit and Cortex-M3 coprocessor, independent bus, and power supply. Three redundant IMU, IMU temperature factory pre-calibration technology, dual redundant barometer design, an all-round guarantee of UAV flight safety and rich expansion capabilities; integrated 100M Ethernet PHY, can communicate with the mission computer (Airborne computer), fiber optic inertial navigation, high-end surveying and mapping cameras and other industrial UAV-mounted equipment for high-speed communication, which meets the needs of high-end UAVs.
Visit Robu.in to get CUAV GPS to pair with The CUAV V6X Flight Controller
Note: For more technical details go through USER GUIDE in the attachment section
Features:
H7 Double Precision Floating-Point Arithmetic Unit Processor
Using STM32H753IIK6 processor, double precision floating point arithmetic unit (DSP&FPU), the main frequency up to 480MHz; 2M FLASH,1 MB RAM; For CUAV V6X Flight Controller to bring powerful computing power, rapid data processing ability, for more functional development and flight stability to provide more possibilities.
M3 Coprocessor to Enhance the Expansion Capacity
The high-performance ARM? Cortex?-M3 coprocessor adds more security and external scalability capabilities to UAVs
Multiple Redundancy Design Ensures Flight Safety
With three redundant IMUs and two redundant barometers on separate buses, when one set of IMUs fails, the system seamlessly switches to another reliable IMU, making the flight safer
Integrated 100M Ethernet Interface
High-speed communication with task computers through Ethernet; In the future, high-end links, INS, and high-end mapping cameras can be connected through Ethernet to meet the needs of high-end UAVs
Adapt to More Complex Magnetic Environments
In order to adapt to the complex magnetic field environment, the RM3100 magnetic compass is selected, which supports the GPS direction-finding function, and completely solves the trouble of magnetic compass interference
Pixhawk V6X Autopilot Flight Controller Modular Design
The CUAV V6X Flight Controller adopts a modular design, and the core module contains the processor and all IMUs. Users can design their own baseboard according to the design reference, to meet the personalized customization needs.
Compatibility with PX4/ArduPilot All Models
CUAV V6X Flight Controller supports all models for PX4&ArduPilot firmware?3-8 Copter/Plane/Helicopter/VTOL/unmanned vehicle/Rover, etc.
Packing Includes:
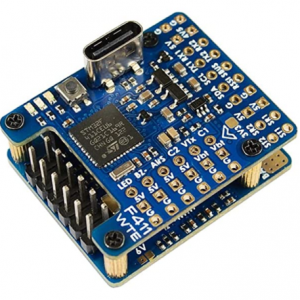
1 x Pixhawk V6X Autopilot
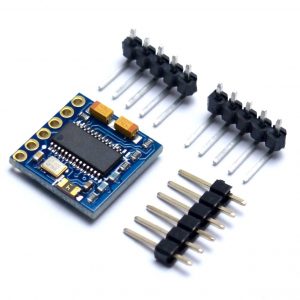
1 x PW-Link Module
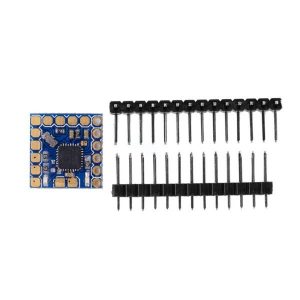
1 x CAN PMU Lite Module
1 x CAN/12C Estension board
1 x TF Memory card
1 x TYPE-C Cable 100cm
1 x RSSI Cable 30cm
1 x DSM RC Cable 30cm
1 x SBUS RC Cable 30cm
1 x PPM RC/SBUS OUT Cable 30cm
1 x Ethernet Cable 40cm
1 x CAN Cable 30cm
1 x TELEM Cable 30cm
1 x UART4 Cable 30cm
1 x?UATR4->12C Cable 30cm
1 x ADIO Cable 30cm
1 x Debug Cable 30cm
1 x SP16 Cable 30cm
1 x GPS Cable 30cm
Additional information
| Weight | 0.424 kg |
|---|---|
| Dimensions | 18 × 16 × 6 cm |
Only logged in customers who have purchased this product may leave a review.





Reviews
There are no reviews yet.