Ready to Connect to PIXHAWK FC with 6-pin connector Attached Receiver type 72-channel M8 engine Galileo-ready E1B/C (NEO-M8N) Nav. update rate1 Single GNSS: up to 18 HZ Acquisition Cold starts: 26 s Onboard Compass
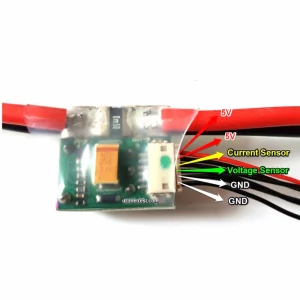
Special for FPV image transmission Provide two version to choose: 5V Suitable for: RC Air Plane Output current: Constant 3A Output voltage: 2-6S( 5V version )
Built from quality glass fiber and polyamide nylon. Integrated PCB connections for direct soldering of your ESCs Pre-threaded brass sleeves for all of the frame bolts. Colored arms for orientation to keep you flying in the right direction. Large mounting tabs on main frame bottom plate for easy camera mounting. Easy assembly.
Input Voltage (V): MC: 4.8V~5.5V (recommended 2S~6S Lipoly). Supported ESC Output 400 Hz refresh frequency Supported Transmitters PCM or 2.4 GHz radio with at least 4 channels Power Consumption MAX: 1.5 W (0.3 A at 5 V) Operating Temperature: -10 to 50°C
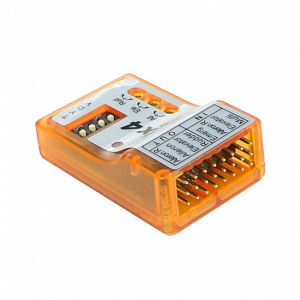
No. of Channels:6 Model type:Glider/Heli/Airlane RF range(Hz):2.4000-2.485 Bandwidth (kHz):500 Band:160 RF Power: Less Than 20 dBm Sensitivity (dBm):1024 Low Voltage Alarm: Yes (less than 9V) DSC port:Yes(PS2; output: PPM)
ATmega328P with Arduino bootloader MAX7456 monochrome on-screen display FTDI cable compatible pinout Standard 6 pin ISP header 2 independent power sections with an LED indicator on each Solder jumpers for combining the power sections Compatible flight controller: APM2.5/2.6/2.8 Pixhawk PX4
8 Channel PWM input 8 motor outputs 12-way Auxiliary input and output Supports GPS, compass, telemetry and power module Onboard connections JST-SH with 1.0mm pitch Compatible with official Firmware and Groundstation.
128Mb Flash(16M Byte) SBUS/PPM input (Pinheaders) DSM/DSM2/DSMX input(Plug) 6PWM output (Pinheaders) Only 36x36mm, mount holes 30.5×30.5mm All through hole pin header Design -no Sh connectors STM32 F405 MCU, Runs Raceflight CC3D REVO firmware Works Perfect with Raceflight or BetaFlight 3.0
Supported Receiver Input Signal: PPM, SBUS, DSM Support PPM, SBUS, DSM receiver input signal Battery voltage detection and buzzer interface Run on SP RACING F3 EVO firmware 32 brush flight control Large current NMOS transistors, operating current can reach 10A or higher Use STM32F303CCT6 + MPU6500, advanced hardware platform F3 for higher flight
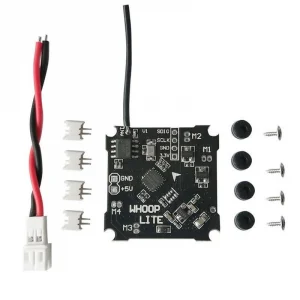
CPU: STM32F030 Six-Axis: MPU6050 Firmware version: Silverware firmware Power Cable: 55mm, with JST-PH 2.0 connector ESC: All FETs are rated at 6A maximum. Support 6x15mm/7x20mm/8x20mm/8.5x20mm etc motors. Size: 26mm x 26mm, fully compatible with the Inductrix quad frame and mounting pattern
Wheelbase: 250mm Material: Full Carbon Fiber Weight: 160 gm The arm equips dampers for the safe landing. The arm has multiple motor mounting holes. Equips vibration-free mounting bracket for FPV camera.
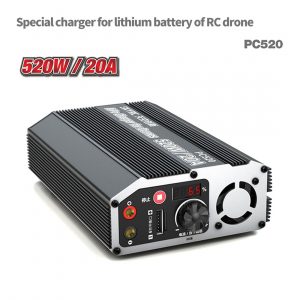
Supports 6s LiPo battery Adjustable charge current from 1.0 to 20.0A The charger can store the charge current of the last charge program LED digits on indicate charge/discharge status Two working modes: balance charge mode and storage mode
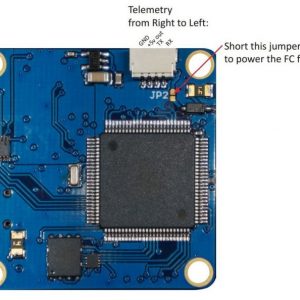
2000 degrees/second 3-axis MEMS gyro + accelerometer (MPU6500). Input voltage: Max 16V on input rail and up to 35V 6s on the voltage sense line. Fully pinout compatible with rev5 accessories (OSDoge etc). SBUS Inverter. Sonar pads w/resistors added for direct connection to 5V sonar. MS5611 barometer. 128mbit flash.
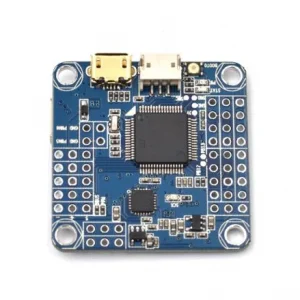
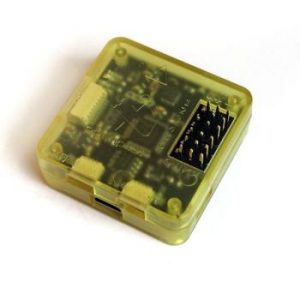
3-axis high-performance MEMs gyros and 3-axis high-performance MEMs accelerometer. Tiny 36 x 36 mm 4 layer PCB for superior electrical noise reduction and flight performance. Software support for Windows, Mac, and Linux. Direct high-speed USB support with no drivers required, a true plug and play device. Spektrum satellite receiver support. Futaba S-BUS hardware support. Innovative Flexi-port technology for superior port flexibility. 4Mbits onboard EEPROM for configuration storage.
"🎉 Enjoy exclusive discounts! Use coupon codes at checkout & get FREE delivery on eligible orders. Shop now! 🚚✨" Dismiss