-
- Out of StockRead more

- Flight Controller & Accessories
CUAV X7+ Flight Controller | Autopilot For PX4 & APM Drone Hardware
- ₹31,214
- Main FMU Processor: STM32H743 Power: 4.5~5.4V Weight: 101 g 14 PWM outputs ?12 support Dshot? Support multiple RC inputs (SBUs/CPPM/DSM) 2 GPS ports(GPS and UART4 ports) 6 i2c buses(Four i2c dedicated ports)
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
CUAV V6X Flight Controller
- ₹30,476
- H7 Double-precision floating-point processor High-performance ARM M3 coprocessor Low-noise Car-grade IMUs Triple redundant IMUs and dual redundant barometer designs Car-grade RM3100 magnetic compass New built-in shock absorption design
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Kakute H7 Mini 1.3V Flight Controller
- ₹9,500
- Processor: STM32H743 32-bit processor Video Processor: AT7456E Video processor for OSD Flash Memory: 128 MByte
-
-

-
-
- Out of StockRead more

- Flight Controller & Accessories
NX4 EVO Flight Controller
- ₹1,690
- Input voltage: 5 ? 6V(DC). Operating Current: 18mA. Net Weight: 11 g. This Controller can be connected to ESC?s? with BEC.
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Kakute H7 V2 Flight Controller
- ₹8,810
- MCU STM32H743 32-bit processor running at 480 MHz VTX ON/OFF Pit Switch ? Switch can be enabled using USER1 in the Beta flight Mode tab. H7 processor @480 MHz Bluetooth onboard 8 Motors outputs in plugs 128 MB flash for logging VTX On/Off switch
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
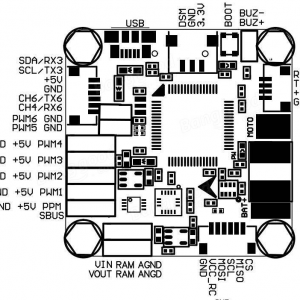
F405 V1.1 Flight Controller+45A 2-6S 4 in 1 ESC Flytower (mpu6500)
- ₹6,220
- Product: F405 V1.1 Flight Controller+45A 2-6S 4 in 1 ESC Flytower This is combo kit of Flight controller & ESC High performance & efficient flight controller & ESC Light weight, Easy to connect Flight controller comes with ARM processor
-
-

-

-

-
-
-
- Out of StockRead more

- Flight Controller & Accessories
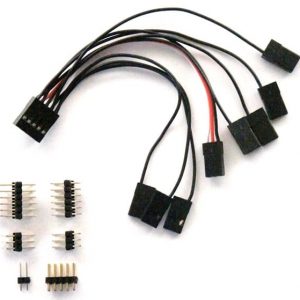
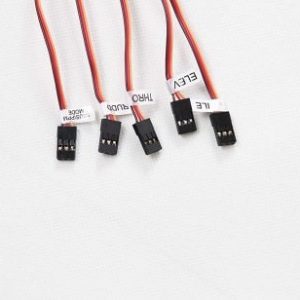
NAZE32 Receiver Cable
- ₹11,900,149
- This is a breakout cable for the Naze32 flight controller This cable specially designed for open source flight controller such as Naze32 to connect with a radio receiver
-
-

-

-
-
-
- Out of StockRead more

- Flight Controller & Accessories
SpeedyBee SB-F4V3-50-STACK
- ₹7,515
- Product: SpeedyBee SB-F4V3-50-STACK MCU: STM32F405 IMU(Gyro): BMI270 USB Port Type: Type-C Barometer: Built-in OSD Chip: AT7456E chip
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
SpeedyBee F745 35A BLS 25.5×25.5 AIO Flight Controller
- ₹13,859
- AIO Flight Controller MCU: STM32F745 IMU(Gyro): MPU6000 Continuous Current: 35A * 4
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
SpeedyBee F7 V3 Flight Controller
- ₹7,399
- SpeedyBee F7 V3 Flight Controller Power Input: 3S-6S Lipo IMU(Gyro): BMI270 USB Port Type: Type-C Weight: 10.7g
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
SpeedyBee F7 Mini 35A 3-6S 8-bit Flight Controller Stack
- ₹10,199
- SpeedyBee F7 35A BLS Mini Stack Power Input: 3-6S LiPo Dimension: 32mm x 35mm x 13mm Weight: 12.7g
-
-
-
-
- Out of StockRead more

- Flight Controller & Accessories
SP Racing F3 Flight Controller Integrate OSD Deluxe Version
- ₹3,850
- 36x36mm board with 30.5mm mounting holes STM32F303 CPU, 72Mhz inc FPU High-Capacity Flash MPU6050 accelerometer/gyro MS5611 barometer (Deluxe only) HMC5883 compass (Deluxe only)
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
SP Racing F3 Flight Controller Integrate OSD ACRO Version
- ₹2,590
- STM32F303 CPU, 72Mhz inc FPU CPU: STM32F303, 72Mhz inc FPU Acro: High-Capacity Flash Accelerometer/gyro: MPU6050 Board size: 36 x 36 x 5mm (without shell) Board weight: 5.9g Weight: 22 gm(with all accessories)
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
SP Racing F3 Flight Controller Deluxe
- ₹2,590
- Stackable design ?? perfect for integrating with OSDs and power distribution boards. 16 PWM I/O lines for ESCs, Servos and legacy receivers. 8 available on standard pin headers. 8 via side mounted connectors. Full support for OneShot ESCs for easy PID tuning and a sharper response. Supports SBus, SumH, SumD, Spektrum1024/2048, XBus, PPM, PWM receivers. No external inverters required (built-in).…
-
-

-

-

-

-
-
- Out of StockRead more
- Flight Controller & Accessories
SP Racing F3 Flight Controller ACRO Version
- ₹2,449
- The STM32F3 CPU, MPU 6050 sensor, 16M high-capacity flash memory, OSD function. The SP F3 runs Cleanflight which can be configured to suit your needs using a cross-platform GUI (Windows/OSX/Linux). Tiny and lightweight, the Racing F3 has a standard 36x36mm form-factor with 30.5mm mounting holes and weighs just 6 grams. Flight Logging, on-board high-capacity black box flight log recorder ??…
-
-
-
- Out of StockRead more

- Flight Controller & Accessories
Readytosky Safety E-Switch
- ₹459
- Adopts E-Switch red light switch Length: 250mm The same version with 3DR official version
-
-
-
- Out of StockRead more

- Flight Controller & Accessories
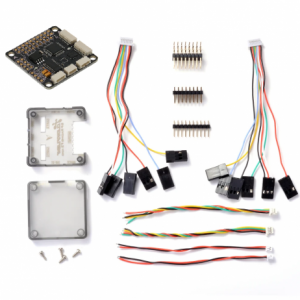
Rctimer ATLAS Flight Control System Included GPS and LED Module
- ₹4,305
- Main controller 4.5~5.5V LED module 7~28V Hovering Accuracy(GPS Mode): Horizontal ?2M, Vertical ?1M Max Tilt Angle: 30? Max Horizontal Speed: 6M/s Max Ascent Speed: 3.2M/s
-
-
-

-
-
- Out of StockRead more

- Flight Controller & Accessories
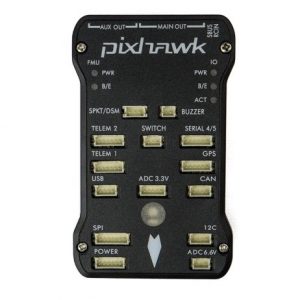
Radiolink Pixhawk Flight controller Board
- ₹14,866
- 32bit STM32F427 Cortex M4 core with FPU 168MHz 256KB RAM 2 MB Flash
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Radiolink CrossRace Flight Controller
- ₹6,300
- Processor: HC32F4A0PITB Input Voltage Range: 2-6S Input Current(A): 5 No. of Output Channels: 12 USB Type: USB Type-C USB Input voltage: 5V+/-0.3V Mounting Hole Spacing: 30.5*30.5mm
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Pixhawk PX4 Autopilot PIX 2.4.8 32 Bit Flight Controller-Normal Quality
- ₹5,499
- The advanced 32-bit ARM CortexM4 high-performance processors can run NuttX RTOS real-time operating system. 14 PWM / servo output. Bus interface (UART, I2C, SPI, CAN). The integrated backup power and backup controller fails, the primary controller fails over to the backup control is safe. Provide automatic and manual modes. Provide redundant power input and failover. Multicolor LED lights. Provide multi-tone…
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Pixhawk PX4 2.4.7 32Bits Flight Controller for Quadcopter Multicopter
- ₹12,999
- Processer:32bit STM32F427 Cortex M4,32-bit STM32F103 Model: PX4 Input Voltage:6-10 V RAM:256 KB
-
-

-
-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Pixhawk PPM Encoder Module
- ₹589
- Support the input channels: 8 Output: PPM SUM × 1 / MUX × 1 Dimensions: 28 x 19 x 5 mm OR 23 x 16 X 7 Weight: 12 gm. (containing all the input and output wires)
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
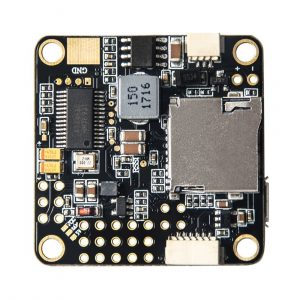
OMNIBUS F4 V2 PRO Flight Controller with SD Card Slot & BEC
- ₹3,169
- Dimensions: 37 x 37 x 10 mm(L x H x W) Weight: 12 gm. SPI Gyro MPU6000 MicroSD Blackbox F4 Processor (F405) 5v3a SBEC Built-in Current Sensor On-Board OSD (controlled by Beta flight, FC over SPI bus) On-Board Video Filter (only can supply 5V to VTX and Camera) On-Board Voltage Regulator and Power supply (BEC)
-
-
-
-

-
-
-
- Out of StockRead more

- Flight Controller & Accessories
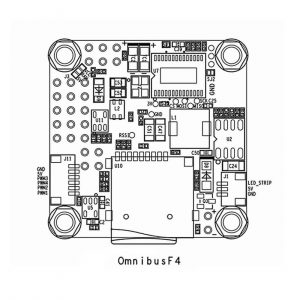
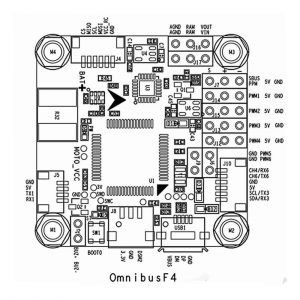
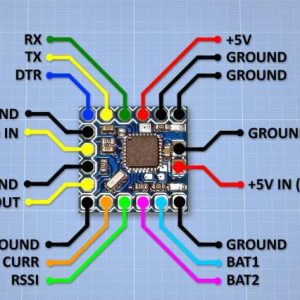
Omnibus F4 V2 PRO Flight Controller with Built-in OSD
- ₹1,990
- STM32 F405 MCU Runs Beta flight (3.0.1 and up) Race light and D-ronin firmware SBUS/PPM input (Pinheaders) 6PWM output (1-4Pinheaders and Sh1.0 Plug, 5-6 as Pinheaders) Only 36x36mm, mount holes 30.5×30.5mm SPI Sensor MPU6000 128Mbit Flash
-
-

-

-

-
-
- Out of StockRead more
- Flight Controller & Accessories
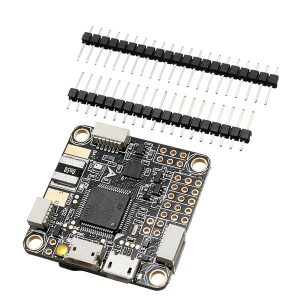
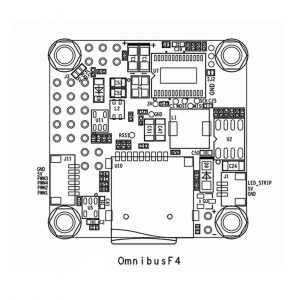
OMNIBUS F4 Pro V3 Flight Controller
- ₹2,990
- STM32 F403 MCU (Spi connected to Gyro) Built-in Current/Voltage sensor! Firmware hex =?OMNIBUSF4SD hex from the drop-down. MPU6000 (the 6 axis SPI Gyrometer + Accelerometer) Smart audio capable VTX PID Programming D- Shot Supported (no Modification) OSD (configured over Betaflight UI) SD CARD Slot for BlackBox SBUS/PPM + DSMX Ports SmartAudio V2 via J10 current + voltage + rssi +…
-
-

-
-
-
-
-
- Out of StockRead more

- Flight Controller & Accessories
Mini OSD FOR APM 2.6/2.8
- ₹1,099
- Supply Voltage: 12V. Current: 500mA. ATmega328P with Arduino bootloader. MAX7456 monochrome on-screen display chip. Supports APM2, APM2.5, APM2.6. Dimensions: 58 x 22 x 12 mm(LxWxH).
-
-
-
- Out of StockRead more
- Flight Controller & Accessories
Micro Minim OSD For Racing F3 Naze32 Flight Controller RC Drone
- ₹649
- ATmega328P with Arduino bootloader. MAX7456 monochrome on-screen display. +5V 500mA regulator for up to +12V supply input. FTDI cable compatible pinout. The standard 6-pin ISP header. Standalone, or with APM/ Flip / Flip32+ flight controllers.
-
-

-
-
-
-
- Out of StockRead more
- Flight Controller & Accessories
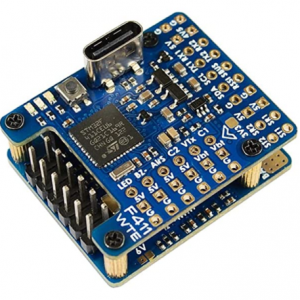
Matek Mateksys FC F411-WTE Compact Flight Controller
- ₹4,649
- MCU: 100MHz STM32F411CEU6 IMU: MPU6000 (SPI) Continuous current: 3.5 Amps Input voltage range: 6~30V Compatible lipo: (2~6S LiPo)
-
-

-
-
- Out of StockRead more
- Flight Controller & Accessories
Matek Mateksys FC F411-WTE Compact Flight Controller
- ₹4,649
- MCU: 100MHz STM32F411CEU6 IMU: MPU6000 (SPI) Continuous current: 3.5 Amps Input voltage range: 6~30V Compatible lipo: (2~6S LiPo)
-
-
-
-
- Out of StockRead more

- Flight Controller & Accessories
Mamba F4 pro V2 flight controller
- ₹2,892
- Model: Mamba F4 pro V2 Input voltage: 2 ?? 6s LiPo support Gyroscope: MPU6000 (reserved external gyroscope interface) Firmware: BetaFlihgt 3.2.0 OMNIBUSF4SD Support Receiver: PPM, SBUS, IBUS, DSM2/DSMX Receiver (UART1) Integrated with OSD, support BF Ground Station adjust OSD Adjust the PID by OSD by remote control
-
-
-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Kakute F4 Flight Controller
- ₹2,019
- MCU: STM32F405RGT6?32-bit processor IMU: ICM20689 (SPI) USB VCP Driver (all UARTs usable simultaneously; USB does not take up a UART) 3 hardware UARTS (UART1,3,6) 128 Mbit Dataflash chip for Blackbox logging 5v Power Out: 1.5 A max 3.3v Power Out: 200 mA max
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Jiyi K3 Apro Flight Controller Kit
- ₹34,234
- Eight rotors: (+ type, X type, V type) Supported ESC type: PWM ESC below 490HZ Maximum output channel: 8 channels Recommended remote control type: SBUS receiver
-
-

-
-
- Out of StockRead more

- Flight Controller & Accessories
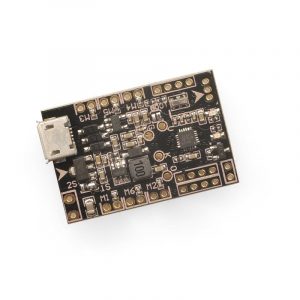
JHEMCU F4 NOXE V3 5V 10V BEC OSD Baro Black Box 2-6S LIPO F411 Flight Controller acro
- ₹2,250
- Brand (trade name): JHEMCU Model: F4 NOXE V3 Main control (MCU): STM32F411CEU6/100 MHz Sensor: BMI 270/Gyro/Accel Video Overlay (OSD): AT7456E
-
-
-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Power Module PM02
- ₹3,051
- UBEC input voltage : 7~51v (2~12s LiPo) Rated current: 60A Max current: 120A(
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Pix32 v6 Flight Controllers FC Module Standard Set
- ₹27,185
- High-performance STM32H743 Processor with more computing power & RAM New cost-effective design with the low-profile form factor A newly designed integrated vibration isolation system to filter out high-frequency vibration and reduce noise to ensure accurate readings IMUs are temperature-controlled by onboard heating resistors, allowing the optimum working temperature of IMUs
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Micro OSD V2
- ₹2,082
- Product: Micro OSD V2 Processor: ATmega328P Display: MAX7456 monochrome Pin: Standard 6-pin ISP header
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Kakute H7 V2 FC & Tekko32 F4 4in1 ESC Stack
- ₹15,955
- MCU: STM32H743 32-bit processor running at 480 MHz IMU: MPU6000 Barometer: BMP280 OSD: AT7456E Onboard Bluetooth chip: ESP32-C3
-
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro kakute F7 & amp- tekko 32 Blheli32 4 in 1 ESC stack
- ₹17,718
- Supports 3-6S Lipo input 35A continuous current, 50A burst MCU: STM32F745 32-bit processor IMU: ICM20689 (SPI) Barometer: BMP280 Current Sensor: Approximately 130 amps maximum measurable value Supports Betaflight, Butterflight, and Cleanflight.
-
-

-
-
-
- Out of StockRead more

- Flight Controller & Accessories
Holybro Kakute F4 V2.4 Flight Controller
- ₹4,500
- MCU ???STM32F405 IMU ?? MPU6000 Barometer ?? BMP280 OSD ?? AT7456E 5x UARTs (1,3,4,4,6,7) 128 Mbit Dataflash chip Battery input voltage: 2S-8S
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
Hobbywing Data Link V2
- ₹4,702
- Product Name: DATALINK V2 Telemetry:?USB, CAN, Serial Voltage:?6-81V Size:?57*40*13mm(without wires) Weight:?27g
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
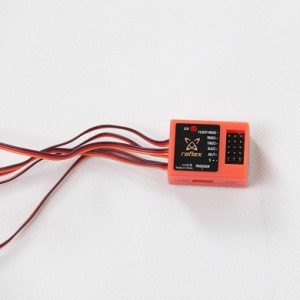
FMS RC Airplane Gyro Reflex Flight Control System
- ₹1,828
- Suitable For FMS 1.2M Ranger Plane. Utilizes a high-speed 32-bit ARM processor onboard. 3 axis gyro and 3 axes accelerometer. Size: 26.0mm x 34.5mm x 14.5mm Weight: 14.5g ( Whole Unit with wire )
-
-

-
-
-
-
- Out of StockRead more

- Flight Controller & Accessories
F3 EVO V2.0 Flight Control
- ₹1,686
- Supported Receiver Input Signal: PPM, SBUS, DSM Support PPM, SBUS, DSM receiver input signal Battery voltage detection and buzzer interface Large current NMOS transistors, operating current can reach 10A or higher Use STM32F303CCT6 + MPU6500, advanced hardware platform F3 for higher flight stability
-
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
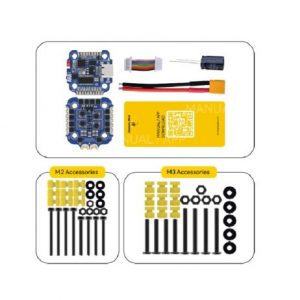
EMAX Mini Magnum 2 F4 35A Flytower 20x20mm 35A 2-6S BLHeli_32 4in1 ESC+F4 Flight Controller OSD+VTX
- ₹7,799
- Stack Size: 20x20mm Flight Controller: F4 Flight Controller (OMNIBUSF4 Firmware) ESC: 4in1 BLHeli_32 35A ESC Supply Voltage: 2-6S lipo VTX: 25mW/200mW
-
-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
CUAV HV_PM Power Module for V5+ | 10-60V Pixhack Pixhawk XT60 Plug For RC Drone FPV
- ₹6,418
- Hold more high input voltage: 10v-60v (3s ~ 14s battery) Voltage detection accuracy: + ?? 0.1v Current detection accuracy: + ?? 0.2aA Support higher power port output current: 5A Maximum (detection) current: 60A
-
-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
AeroFC Flight Controller Board
- ₹21,906
- High-Speed STM32 processor Triple Redundant IMU Light Weight Isolated & Dampened IMU Compatible with Ardupilot and PX4. It can be configured with AeroGCS, Mission Planner, QGround Control software, etc. Limited Time Launch Offer !!!
-
-

-

-

-

-
-
- Out of StockRead more

- Flight Controller & Accessories
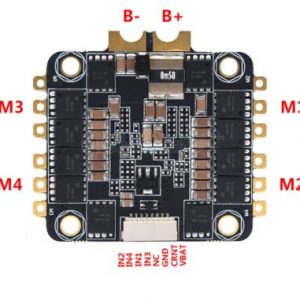
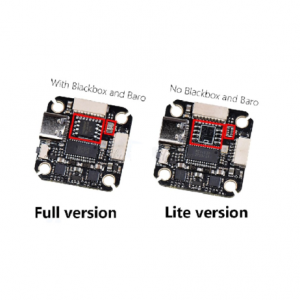
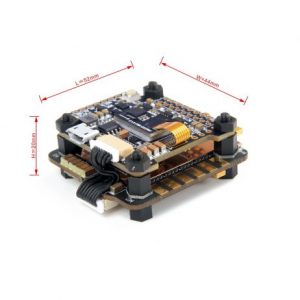
35A 4in1 ESC & F4 V3S Plus Flight Control V3.5 V3 S Built-in Image Filtering OSD
- ₹6,550
- This is combo kit of Flight controller & ESC High performance & efficient flight controller & ESC Light weight, Easy to connect Compact in size Flight controller comes with ARM processor ESC is build to give best performance
-
-

-

-

-
-