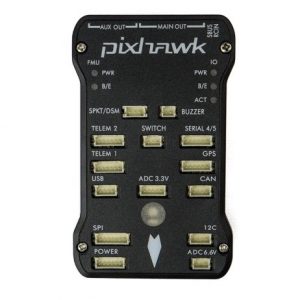
The advanced 32-bit ARM CortexM4 high-performance processors can run NuttX RTOS real-time operating system. 14 PWM / servo output. Bus interface (UART, I2C, SPI, CAN). The integrated backup power and backup controller fails, the primary controller fails over to the backup control is safe. Provide automatic and manual modes. Provide redundant power input and failover. Multicolor LED lights. Provide multi-tone…
Support the input channels: 8 Output: PPM SUM × 1 / MUX × 1 Dimensions: 28 x 19 x 5 mm OR 23 x 16 X 7 Weight: 12 gm. (containing all the input and output wires)
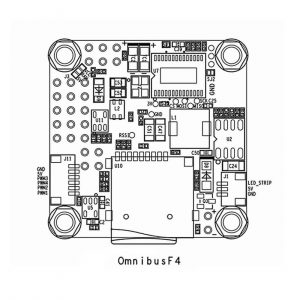
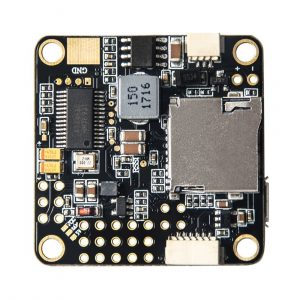
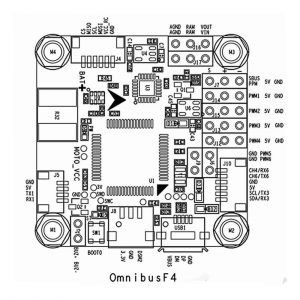
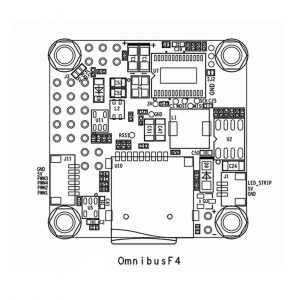
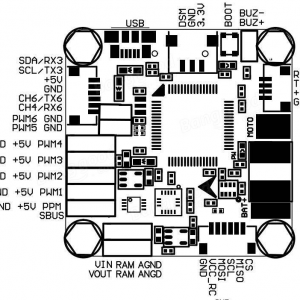
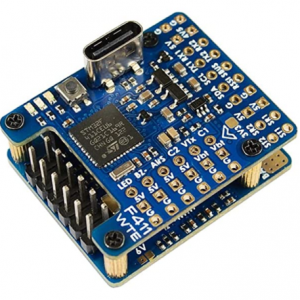
Dimensions: 37 x 37 x 10 mm(L x H x W) Weight: 12 gm. SPI Gyro MPU6000 MicroSD Blackbox F4 Processor (F405) 5v3a SBEC Built-in Current Sensor On-Board OSD (controlled by Beta flight, FC over SPI bus) On-Board Video Filter (only can supply 5V to VTX and Camera) On-Board Voltage Regulator and Power supply (BEC)
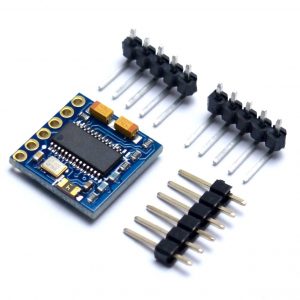
ATmega328P with Arduino bootloader. MAX7456 monochrome on-screen display. +5V 500mA regulator for up to +12V supply input. FTDI cable compatible pinout. The standard 6-pin ISP header. Standalone, or with APM/ Flip / Flip32+ flight controllers.