Model: Mamba F4 pro V2 Input voltage: 2 ?? 6s LiPo support Gyroscope: MPU6000 (reserved external gyroscope interface) Firmware: BetaFlihgt 3.2.0 OMNIBUSF4SD Support Receiver: PPM, SBUS, IBUS, DSM2/DSMX Receiver (UART1) Integrated with OSD, support BF Ground Station adjust OSD Adjust the PID by OSD by remote control
MCU: STM32F405RGT6?32-bit processor IMU: ICM20689 (SPI) USB VCP Driver (all UARTs usable simultaneously; USB does not take up a UART) 3 hardware UARTS (UART1,3,6) 128 Mbit Dataflash chip for Blackbox logging 5v Power Out: 1.5 A max 3.3v Power Out: 200 mA max
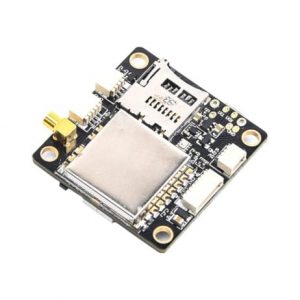
High-performance STM32H743 Processor with more computing power & RAM New cost-effective design with the low-profile form factor A newly designed integrated vibration isolation system to filter out high-frequency vibration and reduce noise to ensure accurate readings IMUs are temperature-controlled by onboard heating resistors, allowing the optimum working temperature of IMUs
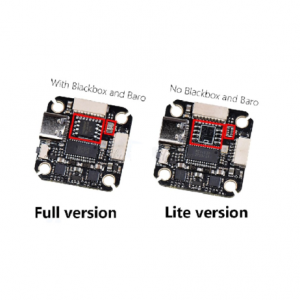
Suitable For FMS 1.2M Ranger Plane. Utilizes a high-speed 32-bit ARM processor onboard. 3 axis gyro and 3 axes accelerometer. Size: 26.0mm x 34.5mm x 14.5mm Weight: 14.5g ( Whole Unit with wire )
"🎉 Enjoy exclusive discounts! Use coupon codes at checkout & get FREE delivery on eligible orders. Shop now! 🚚✨" Dismiss