-
- Out of StockRead more

- Drivers, Motors, Pumps, Stepper Motor Drivers
DM860H Stepper Motor Driver
- ₹4,455
- Model: DM860H Input voltage: 24V??110VDC Weight: 487g Input Frequency: up to 200KHz
-
-

-

-

-

-
-
- Out of StockRead more

- Dimension Engineering Motor Drivers, Drivers, Motors, Pumps
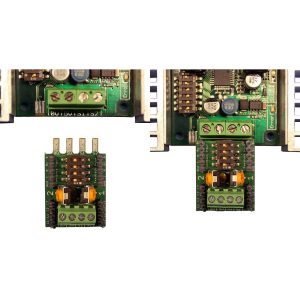
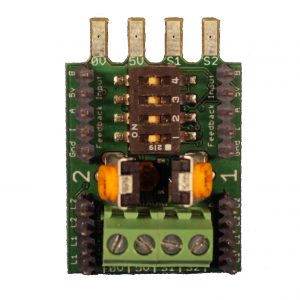
Double Switch radio controlled dual 8A relay
- ₹2,985
- Product: Relay Max relay voltage: 240VAC Max relay current: 8A at 12VDC, 8A at 240VAC Relay resistance: 100 mΩ max Operating voltage: 3.5V to 5.5V
-
-
-
- Out of StockRead more

- Drivers, Motors, Pumps, Stepper Motor Drivers
DRV8833 2 Channel DC Motor Driver
- ₹77
- Dual-H-bridge motor driver: can drive two DC motors or one bipolar stepper motor Operating voltage: 2.7?????V to 10.8?V Output current: 1.2?A continuous (2?A peak) per motor Inputs are 3V- and 5V-compatible
-
-

-

-

-
-
- Out of StockRead more

- Brushed / Brushless DC motor Driver, Drivers, Motors, Pumps
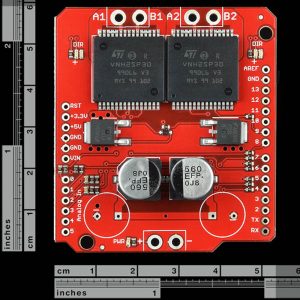
Dual Monster Moto Shield VNH3ASP30 DC Motor Driver 2x14A (Peak 30A)
- ₹3,933
- Voltage Max: 16V Maximum current rating: 30 A Practical Continuous Current: 14 A Current sensing available to Arduino analog pin MOSFET on-resistance: 19 mΩ (per leg) Maximum PWM frequency: 20 kHz Thermal Shutdown Undervoltage and Overvoltage shutdown.
-
-

-

-
-
-
- Out of StockRead more

- Drivers, Motors, Pumps, Servo Motor Drivers
G15 Driver for G15 Cube Servo
- ₹578
- Maximum Continuous Current: 8A 2 x G15 Cube Servo ports (can be daisy chained to more servos) External power terminal for Cube Servo. 2 LEDs as logic power and servo power indicators. 3.3V and 5V signals compatible.
-
-

-
-
- Out of StockRead more
- Dimension Engineering Motor Drivers, Drivers, Motors, Pumps
Kangaroo X2 Motion Controller
- ₹2,217
- Model: Kangaroo x2 2 channel self-tuning PID controller Position or speed control Quadrature encoder feedback or potentiometer feedback Support for limit switches and mechanical stops Analog, R/C, and serial inputs
-
-
-
-
-
- Out of StockRead more

- Brushed / Brushless DC motor Driver, Drivers, Motors, Pumps
L293D Motor Driver Board for ESP8266 WiFi NodeMcu Lua ESP12E
- ₹150
- Motor Power Range: 4.5V ~ 36V Control supply range: 4.5V ~ 9V Logical operating current Iss: ??60mA Driving part of the work current Io: ??1.2A Maximum power dissipation: 4W (T = 90 ??) Operating temperature : -25 ?? ~ + 125 ?? Drive Type: Dual high-power H-bridge driver
-
-

-

-

-

-
-
- Out of StockRead more

- Drivers, Motors, Pumps, Servo Motor Drivers
M5STACK H-bridge Unit(STM32F030)
- ₹1,250
- MCU: STM32F030F4P6 DC bidirectional motor driver chip RZ7899 External access DC voltage MAX: 12V I2C mailing address Default 0x20 (can be modified by toggle of the encoding switch) Maximum allowable current: 3A
-
-

-

-

-

-
-
- Out of StockRead more
- Drivers, Motors, Pumps, Stepper Motor Drivers
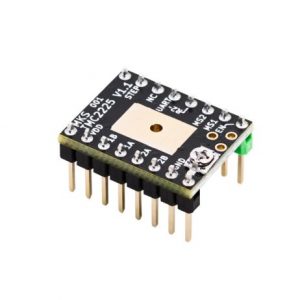
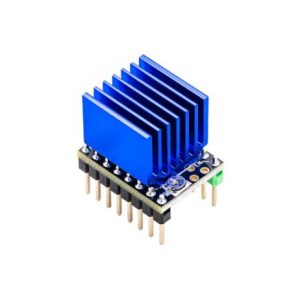
MakerBase MKS TMC2225 Stepper Motor Driver with Heat Sink
- ₹388
- MakerBase MKS TMC2225 Stepper Motor Driver with Heat Sink Model: TMC2225 Length: 20mm Width: 15mm Weight: 6g
-
-

-

-
-
-
- Out of StockRead more
- Cytron Motor Drivers, Drivers, Motors, Pumps
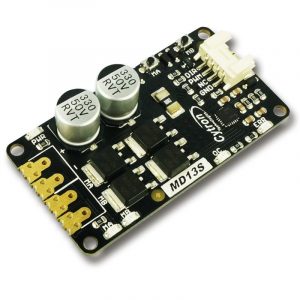
MD13S 13Amp DC Motor Driver GROVE Compatible
- ₹1,505
- Support motor voltage ranges from? 6V to 30V Maximum current up to 13A continuous and 30A peak (10 seconds). GROVE compatible 3.3V and 5V logic level input. SMD compatible Peak Current (A): 30 (10 seconds) Continuous Current (A): 1 No. of Channels: 1
-
-

-
-
- Out of StockRead more
- Drivers, Motors, Pumps, Stepper Motor Drivers
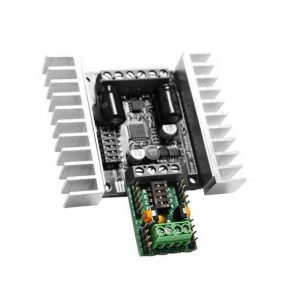
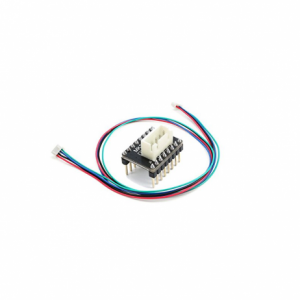
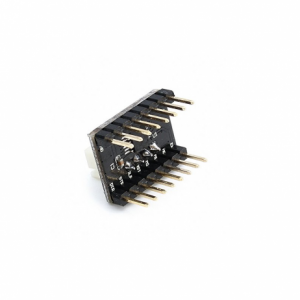
MKS CD V1.0 External Stepper Driver Interfacing Module
- ₹199
- Helps You Utilize External Stepper Drivers Acts As Interface Between Full-Sized Drivers And The A4988 Form Factor Easy To Use
-
-

-

-
-

-
-
- Out of StockRead more

- Drivers, Motors, Pumps, Stepper Motor Drivers
MKS SBASE V1.3 32-bit Open Source Smoothieboard
- ₹6,432
- 32bit 100M Cortex-M3 MCU-LPC 1768 High-performance Support highly modular open source firmware Smoothieware Easy for secondary development ?Support network function, then proceed remote control via IE Explorer.
-
-

-

-